Adaptive Cruise Control (ACC)
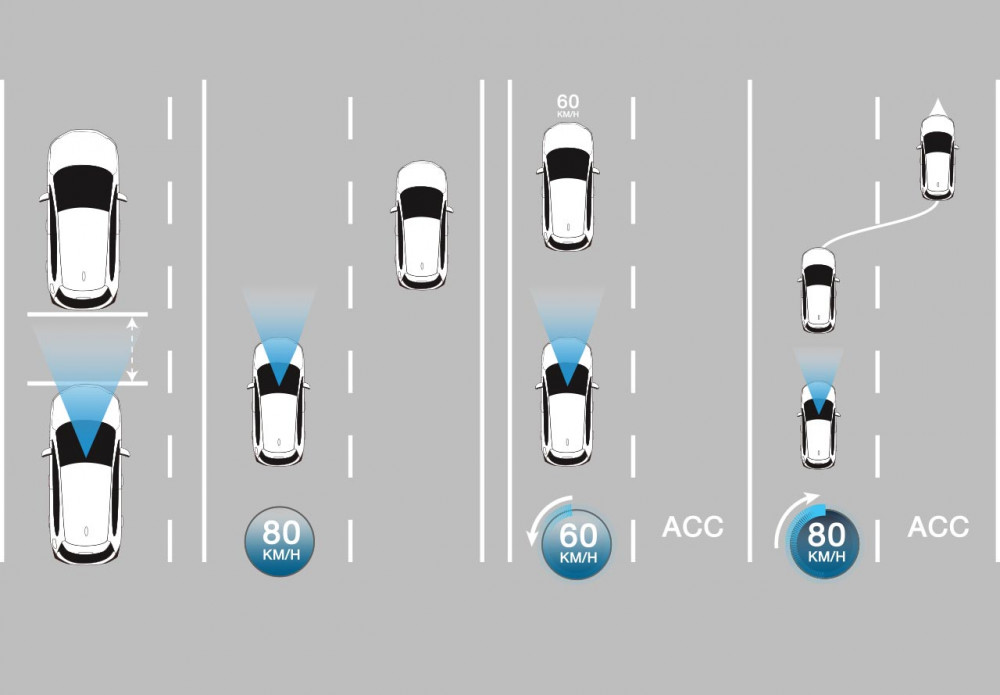
Membantu menjaga kestabilan kecepatan kendaraan dan mengatur jarak di belakang kendaraan yang terdeteksi di depan.
Membantu menjaga kestabilan kecepatan kendaraan dan mengatur jarak di belakang kendaraan yang terdeteksi di depan.